











Her geçen gün gelişmeye devam eden robot teknolojileri, endüstriyi de beraberinde dönüştürüyor. Özellikle endüstriyel robot alanını yakından ilgilendiren yeni bir dişli teknolojisi ise, ezberleri bozacak yeni bir teknoloji doğuruyor: ABENICS. Uygun bir benzetmeyle insan omzunun yapısını ve hareket kabiliyetini kopyalayan küresel dişli bağlantılarına dayalı üç yönlü aktif bilyalı mafsal mekanizması ABENICS, kayma olmaksızın üç dönme serbestlik derecesi (RDoF) sağlıyor.
Toplumsal beklentiler doğrultusunda çoklu serbestlik dereceli (DoF) mekanizmalar, aktüatörler ve entegre robot eklemleri üzerine araştırmalar devam ediyor. Birden fazla serbestlik derecesi (DoF) tek bir eklemde harekete geçirilebilirse, robotlar geleneksel robotlardan daha küçük, daha az maliyetli ve daha işlevsel hale geliyor.
Yamagata Üniversitesi Makine Mühendisliği Bölümü’nde çalışan Kazuki Abe ve Riichiro Tadakuma ile Tohoku Üniversitesi Bilgi Bilimleri Enstitüsü’nde görev yapan Kenjiro Tadakuma tarafından geliştirilen yeni dişli teknolojisi ABENICS, geliştiricileri tarafından ele alınan makalede en ince ayrıntıları ve teorik hesaplamalarıyla birlikte IEEE Transactions on Robotics Dergisi’nde yayınlanıyor.
Yıllar boyunca, birden fazla DoF’yi tek bir eklemde (temas yüzeyi) birleştiren çok sayıda mekanizma ve aktüatör tasarlanırken; kuvvet aktarımı için sürtünmeyi kullanan klasik mekanizma, bir küre ve stratejik olarak yerleştirilmiş birkaç sürtünme çarkından oluşuyor. Klasik mekanizmalar üç Rotasyonel DoF (RDoF) ile sınırsız hareketlere izin verse de, sürtünme kayıpları göz ardı edilemiyor. Son yıllarda bu sorun, sürtünme tekerleğinin bir omni tekerlek ile değiştirilmesiyle çözülüyor ancak; kayma, harici üç boyutlu sensörler olmadan yüksek torkun etkili bir şekilde aktarılmasını ve hassas konumlandırmayı engelliyor. Başka bir yaklaşımda ise, piezoelektrik veya manyetostriktif elemanlardan gelen yüksek frekanslı titreşimler kullanılıyor. Bu tasarımlar geniş hız aralıkları ve basit yapıları nedeniyle kompakt kabul edilirken, yukarıdaki sorunları hafifletmiyor. Asenkron veya adımlı motorların üç boyutlu uzantıları olan temassız aktarımlı küresel aktüatörler de öneriliyor. Bunlar, yüksek güç kapasitesi sağlamalarına rağmen büyük elektrik ve işlemsel kaynaklar tüketiyorlar. Ek olarak, bu aktüatörler için düşük hızda yüksek tork çıkışı sağlayacak bir dişli redüktörünün yapılması oldukça zorlu bir konuyu oluşturuyor. Küresel geometri yerine, bazı araştırmacılar küresel bağlantılı veya kaydırıcıdan oluşan bir bağlantı mekanizması öneriyor. Bu mekanizmalar, aktüatörlerin sistemin tabanına yerleştirilebilmesi nedeniyle yüksek konumlandırma doğruluğu ve mükemmel dinamik özellikler sağlıyor; ancak bağlantılar arasındaki fiziksel girişim, yönlendirmenin hareket aralığını sınırlıyor. Özellikle üç RDoF gerektiren hareketlerde hem menzil hem de sertlik elde etmek zorlu bir görevden oluşuyor.
Devrim yaratan yeni teknoloji
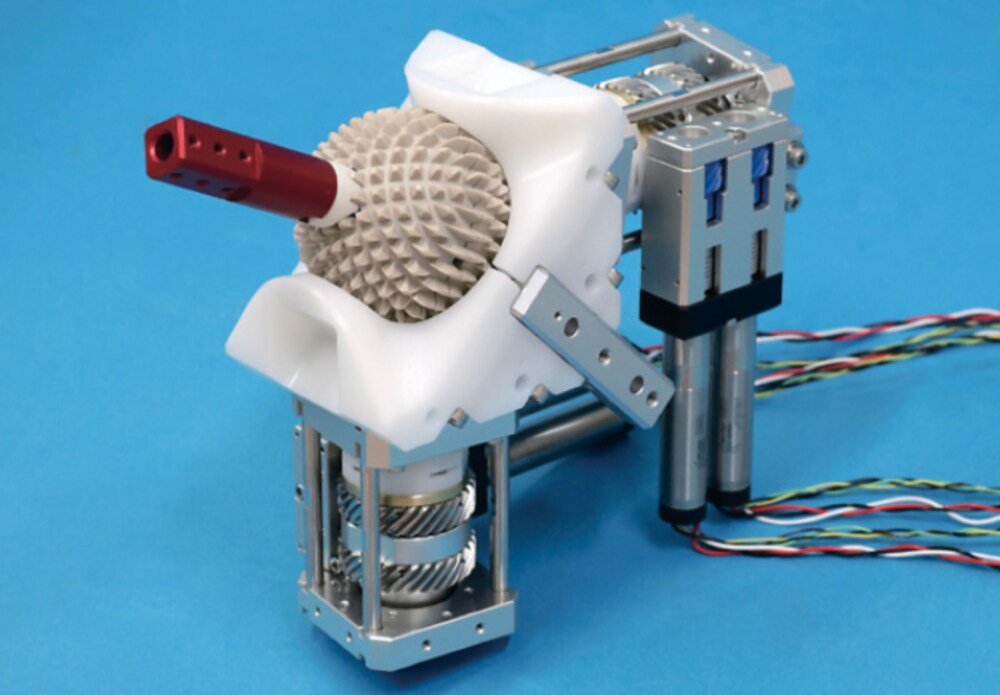
Küresel dişlilerin etkileşimiyle geliştirilen üç yönlü aktif bilyalı mafsal mekanizması, kayma olmaksızın üç dönme serbestlik derecesini (RDoF) hareket ettiriyor. ABENICS’in yetenekleri; iki farklı yenilikçi dişli olan çapraz küresel dişli (CS dişli) ve tek kutuplu dişli (MP dişli) arasındaki benzersiz etkileşimlerden ve bu etkileşimlerin CS dişlinin dörtgen küresel diş yapısıyla üst üste bindirilmesinden esinleniyor. Bir MP dişlisi CS dişlisinin üç RDoF’undan ikisini kısıtlıyor. MP dişlisini çalıştıran tahrik modülü bu ‘kısıtlamayı’ bir ‘tahrike’ dönüştürüyor ve CS dişlisini iki RDoF ile çalıştırıyor. CS dişlisi, üç RDoF itici kuvveti elde etmek için iki MP dişlisinin neden olduğu etkileşimleri dik olarak üst üste getiriyor. ABENICS mekanizması üzerinde modellenen eş değer bir bağlantının analiz edilmesiyle ortaya çıkarılan prensipte, bağlantı aynı zamanda kinematik ve tork denklemlerine de yol açıyor. ABENICS’in teorisi ve fiziksel özellikleri, üretilen prototipler üzerinde yapılan kapsamlı ve sürekli konumlandırma deneyleriyle doğrulanıyor. Aktüatör yerleşiminin esnekliği de tahrik modüllerinin farklı konfigürasyonlarında da doğrulanıyor. Aktif bilyalı mafsal ABENICS, robot mafsalları ve yön kontrol mekanizmaları için geçerli olan yön sensörü olmadan üç dönme serbestlik derecesine de yüksek tork ve güvenilir konumlandırma iletebiliyor.
Üç RDoF’u aktif olarak çalıştırabilen ABENICS
Prototip geliştirme ve deneylerden elde edilen bulgulara dayanarak, pratik sorunların masaya yatırıldığı çalışmada; mekanizma tasarımının ilerletilmesi ve üretim doğruluğunun iyileştirilmesinin, boşluğu azaltması ve sürüş modülünün minyatürleştirilmesini sağlayarak ABENICS’i gelecekteki pratik uygulamalara yönlendirmesi bekleniyor.
Kazuki Abe, Riichiro Tadakuma ve Kenjiro Tadakuma’nın küresel dişli mekanizmasına dayanan yeni ABENICS çalışması, üç RDoF’u aktif olarak çalıştırabiliyor. Çalışmada ilk olarak, dörtlü küresel diş yapısına sahip bir CS dişli ve bu CS dişli ile sürekli iç içe geçmeye izin veren benzersiz bir geometriye sahip MP dişli tanıtılıyor. İç içe geçme sırasında iki dişli tipinin kaplin ve kayma hareketleri yoluyla etkileşime girmesi, tek bir MP dişlinin CS dişlisinin iki RDoF’unu kısıtlamasına veya hareket etmesine izin veriyor. Bu çalışma, CS dişlisinin üç RDoF’unun iki aşamalı farklı diş yapısına sahip iki MP dişlisinin tahrik edilmesiyle elde edildiğini ortaya koyuyor. Makalede açıklanan bu fikir, dişli mekanizması ile bir bağlantı mekanizmasının mekaniksel eşdeğerliği ile güçlendiriliyor. Ayrıca, mekanizmanın ABENICS kabiliyetinin MP dişlilerinin (tahrik modülleri) konumsal düzenlemesinden bağımsız olduğunu gösteriyor. Dahası, eşdeğer bağlantı ileri/ters kinematiğe ve tork ilişkisine yol açarak bu mekanizmanın harekete geçirme fazlalığını da netleştiriyor.
Mafsal torkunun stratejik olarak dağıtılmasının bu mekanizmayı daha işlevsel hale getireceğinin belirtildiği makalede, şu ifadeler kullanılıyor: “Geliştirilen bir prototip makine ve mekanizmanın modellenmesiyle oluşturulan bir kontrol algoritması uygulanarak, MP dişlilerinin (dik ve zıt tip) iki farklı konumsal düzenlemesi için üç RDoF elde edilir. Konumlandırma ve yörünge izleme deneylerinin sonuçları ABENICS’in mekanizmasını doğrulamış ve CS dişlisinin herhangi bir yönden herhangi bir yönelime ulaşabileceğini kanıtlamıştır. Sonuçlar ayrıca konumlandırmada geri tepme kaynaklı bir hatayı ve CS dişlisinin kutuplarına yakın MP dişlisinde bir tekilliği ortaya çıkarmıştır. Kutuplara yakın tekillik CS dişlisinin dönme hızını sınırlasa da bu sınırlama mekanizmanın pratik uygulanabilirliğini önemli ölçüde azaltmamalıdır; çünkü atalet momenti gimbal mekanizmasındakinden daha küçüktür, tahrik modülü ve çıkış bağlantısı esnek bir şekilde tasarlanabilir. Buna ek olarak, tekilliğin yakınındaki torku yükseltmek ve CS dişlisinin yönünü bir motor itici gücü gerektirmeden kilitlemek mümkün olabilir.”
Bu ürünle ilgili talep oluşturun
Yazıda yer alan ürün veya çözüm hakkında, ilgili firmayla doğrudan iletişime geçmenizi sağlayalım.